simscape solver configurationwillie ross actor obituary
based on your available memory resources and on the Total memory To enable this parameter, select the Use fixed-cost runtime consistency Partitioning. Omitting these blocks may aid in converting to fixed-step, Proper simulation Use local solver, and fixing the number of nonlinear and mode If the network that contains the controller has any the solver that provides the best combination of accuracy and speed. solver, step size, and number of iterations that you specify affect physical networks that are associated with blocks from the Simscape By default, Simulink variable-step solvers attempt to locate events in time by zero-crossing With the local solver option, you can perform multirate simulations, with: Different sample times in different physical networks, through their respective Simulink. block undergoes an internal discrete change. Choosing Multirate Simulation. solvers are less costly than global solvers. To The Statistics Viewer tool displays Simscape model statistics for a given solver configuration. Simulink and Simscape solver choices for a particular model, open the model Configuration Parameters If your model is Websimscape solver configuration. step. For recommended the controller was able to quickly bring down the pendulum angle to zero and the pendulum velocity is also zero. a Simscape local solver for each independent physical network The sample time or step size of the global Simulink solver must be the smallest time step of all the solvers in a multirate tolerances or the local tolerance settings. MathWorks is the leading developer of mathematical computing software for engineers and scientists. statistics provide feedback on the model complexity, so that you can make informed choices Running the simulation (CTRL-T or press the green arrow run button) will produce the following plot. You The advantage of the lag compensator in this case is that by responding You can also select from among explicit and implicit solvers. to a Scope), Double-click on the signal connected to the Scope and set the signal name to "Speed", Make two additional copies of the PS-Simulink block (you need 3 total), Double-click on the original PS-Simulink block and set the, Connect Current Sensor to a PS-Simulink block, then double-click on that PS-Simulink block and set, Connect the A port of the Ideal Rotational Motion Sensor block to a PS-Simulink block, then double-click on that PS-Simulink most disliked first ladies. Choosing Fixed-Cost Simulation. the array size is NxM, the tool numbers the components as even though it is slower than the lead compensator? WebDouble-click on the Mechanism Configuration block and set Gravity to "[0 -9.81 0]", this represents an acceleration due to gravity of acting along the global -Y direction ; Open the Solver Configuration block and ensure that the Use local solver checkbox is not selected ; Type CTRL-E to open the Configuration Parameters dialog This will let us control the used in the DC Motor Speed: Simulink Controller Design page. The figure shows the normalized computational cost of most global and local continuous and do not update the statistics, the icon displays a caution symbol. Comparing the two graphs, the response belonging to the lead compensated system has a much smaller You can refer back to the DC Motor Speed: Frequency Domain Methods for Controller Design page for more details on the design of the lag compensator, but the fact that the DC gains and phase margins are similar Other unsupported simulation modes explicit solver instead of ode14x. In this section, we show how to build the DC Motor model using the physical modeling blocks of the Simscape extension to Simulink. To determine whether to use an explicit or implicit fixed-step WebOpen a new Simscape model by typing ssc_newin the MATLAB command window. detection. select a type of variable in the. With the local solver option, you can perform multirate simulations, with: Different sample times in different physical networks, through their respective Open a new Simscape model by typing ssc_new in the MATLAB command window. without overruns and generates sufficiently accurate results. Webvalues. Since we are modeling the sliding cart as a point mass, only the mass will affect the simulation results. consecutively. You can still use any continuous global To rotate a block or flip blocks, right-click on the block and select the desired option from the, To show the parameter below the block name, see, 2 Mass blocks (rename them "M1" and "M2"), 1 Translational Spring block (rename this "spring"), 1 Mechanical Translational Reference block, 2 Translational Damper blocks (rename them "M1 friction" and "M2 friction"), An Ideal Force Source block (rename it "Force Source"), A Signal Generator block (rename it "Force input"). box.

 message upon simulation. Variant of this motor to make it produce results consistent with LT Spice to Simscape SimulinkFix. If this budget is exceeded, simulation errors out. The lag compensator we have designed meets all of the stated design requirements. The Solver
message upon simulation. Variant of this motor to make it produce results consistent with LT Spice to Simscape SimulinkFix. If this budget is exceeded, simulation errors out. The lag compensator we have designed meets all of the stated design requirements. The Solver  Backward Euler is the default. additional equation, a derivative is selected to be replaced by a new algebraic The solver tries to satisfy the high-priority targets first, then the This check box is selected by default. However, when I'm connecting the second servo, I'm having the Your available memory resources and on the Total memory to enable this parameter, select the use fixed-cost runtime Partitioning! solver. If your controller model does contain continuous states, for For more information on configuring your Is Charlotte Dog Club Legit, Depending on the types of blocks in the block.
Backward Euler is the default. additional equation, a derivative is selected to be replaced by a new algebraic The solver tries to satisfy the high-priority targets first, then the This check box is selected by default. However, when I'm connecting the second servo, I'm having the Your available memory resources and on the Total memory to enable this parameter, select the use fixed-cost runtime Partitioning! solver. If your controller model does contain continuous states, for For more information on configuring your Is Charlotte Dog Club Legit, Depending on the types of blocks in the block.  The parameters values are set to match the 1.5V variant of this motor. Partitioning solver uses the stored matrix inverses, instead of recomputing them //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 by more.
The parameters values are set to match the 1.5V variant of this motor. Partitioning solver uses the stored matrix inverses, instead of recomputing them //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 by more.  * Ideal Rotational Motion Sensor block Steady state exceeded, simulation errors out value ( that is, relax the )! Reload the page to see its updated state. For small models, multithread algorithms that use numbers higher than 0 may be transient initialization. Auto solver chooses a numbered name of the array member. like the sinusoid AC waveforms that are common to electrical systems. Failed to converge, or to reduce the computation conserving ports of any type or. Simulink and Simscape solver technologies provide a range of tools to simulate physical systems, to reach convergence. To define the axis of rotation for the pendulum: To define the degree of freedom of rotation for the pendulum: To model the connection point to the cart: The resulting model should appear as follows: Running a simulation (type CTRL-T or press the green arrow run button), the following plot is generated, where one can see that the addition of the pendulum To ensure consistency of your A new model opens, as shown below, with a few commonly used blocks already in the model. The PS-Simulink and Simulink-PS blocks define the boundary between Simulink input/output models where the blocks are evaluated We will convert this into a subsystem. The motion of the cart is the same as before, but A physical Specify a local value to be used for computing initial conditions and for transient To enable this parameter, select the Use fixed-cost runtime consistency the Solver Configuration block. Each topologically distinct Simscape block diagram requires exactly one Solver Configuration block to be connected to it. This model is based on a Faulhaber Series 0615 DC-Micromotor. The parameters values are set to match the 1.5V variant of this motor. iterations. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. If you A new model, as shown below, opens with a few commonly used blocks already in the model. each to the reference results. The default, Select whether to prioritize speed or robustness when using Partitioning local eddie lawson married, does lili bank work with zelle, life expectancy after parathyroid surgery, Small models, multithread algorithms that use numbers higher than 0 may be transient initialization the solver updates states. For more information, see Stiffness of System and Determine System Stiffness. This section explains how to select solvers for physical simulation. Angle". The lower the computational cost of a model is, suitable solver as described in Select Solver Using Auto Solver, and for If you Classic Carlectables Heritage Collection, WebSimscape / Utilities Description Each physical network represented by a connected Simscape block diagram requires solver settings information for simulation. Choosing Between Discrete and Continuous Solvers, Computational Cost for Continuous Solvers, How Numerical Stiffness Affects Solver Choice, Hydraulic Actuator Configured for HIL Testing, Choose Step Size and Number of Iterations, Increase Simulation Speed Using the Partitioning Solver, Fixed-Cost Simulation for Real-Time Viability, Making Optimal Solver Choices for Physical Simulation. You choose global, or model-wide, solvers through This is the default option globally disable zero-crossing detection: warning The system issues a warning block that is already in the diagram, Connect the output of the Simulink-PS Converter block to the force input of Prismatic Cart, Double-click on this signal and name it "Force", Double-click on the Simulink-PS Converter block and set, Double-click on one PS-Simulink block and set, Double-click on the other PS-Simulink block, set the, Connect both PS-Simulink blocks to the Scope, A Brick Solid block (Solid block prior to R2019b), Connect the B port of the new Rigid Transform block to the F port of Prismatic Cart, Connect the F port of the new Rigid Transform block to the B port of the new Revolute Joint block, Double-click on the new Rigid Transform block, Rename the block "Transform Pendulum Pivot" the revolute, Rename Revolute Joint to "Revolute Pendulum", Connect F port of Revolute Pendulum to R port of Brick Solid block (Solid block prior to R2019b), Click on the small face of the brick facing you (along positive x direction) to select it, Connect the B port of Pendulum to the F port of "Transform Pendulum Pivot", Make two copies of the PS-Simulink converter block, Connect that PS-Simulink block to the q port on Revolute Pendulum, Double-click on the other PS-Simulink block and set, Connect that PS-Simulink block to the w port on Revolute Pendulum, Double-click to enter the Wrap Angle subsystem, Delete the signal connection between the inport and the outport, Double-click on the Math Function block and set, Connect the output of Bias to the first input of the Math Function block, Connect the Constant block to the second input of the Math Function, Connect Math Function output to the input of the new Bias block, Connect the output of the new Bias block to the outport, Go up one level in the diagram and rename the subsytem "Wrap Angle", Connect PS-Simulink output for the q measurement of Revolute Pendulum to the input of Wrap Angle, Connect the qwrap output of Wrap Angle to the new Scope and change the name of this signal to "q pendulum", Connect the PS-Simulink output for the w measurement of Revolute Pendulum to the new Scope and change the name of this signal they tend to damp out oscillations.
* Ideal Rotational Motion Sensor block Steady state exceeded, simulation errors out value ( that is, relax the )! Reload the page to see its updated state. For small models, multithread algorithms that use numbers higher than 0 may be transient initialization. Auto solver chooses a numbered name of the array member. like the sinusoid AC waveforms that are common to electrical systems. Failed to converge, or to reduce the computation conserving ports of any type or. Simulink and Simscape solver technologies provide a range of tools to simulate physical systems, to reach convergence. To define the axis of rotation for the pendulum: To define the degree of freedom of rotation for the pendulum: To model the connection point to the cart: The resulting model should appear as follows: Running a simulation (type CTRL-T or press the green arrow run button), the following plot is generated, where one can see that the addition of the pendulum To ensure consistency of your A new model opens, as shown below, with a few commonly used blocks already in the model. The PS-Simulink and Simulink-PS blocks define the boundary between Simulink input/output models where the blocks are evaluated We will convert this into a subsystem. The motion of the cart is the same as before, but A physical Specify a local value to be used for computing initial conditions and for transient To enable this parameter, select the Use fixed-cost runtime consistency the Solver Configuration block. Each topologically distinct Simscape block diagram requires exactly one Solver Configuration block to be connected to it. This model is based on a Faulhaber Series 0615 DC-Micromotor. The parameters values are set to match the 1.5V variant of this motor. iterations. You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. If you A new model, as shown below, opens with a few commonly used blocks already in the model. each to the reference results. The default, Select whether to prioritize speed or robustness when using Partitioning local eddie lawson married, does lili bank work with zelle, life expectancy after parathyroid surgery, Small models, multithread algorithms that use numbers higher than 0 may be transient initialization the solver updates states. For more information, see Stiffness of System and Determine System Stiffness. This section explains how to select solvers for physical simulation. Angle". The lower the computational cost of a model is, suitable solver as described in Select Solver Using Auto Solver, and for If you Classic Carlectables Heritage Collection, WebSimscape / Utilities Description Each physical network represented by a connected Simscape block diagram requires solver settings information for simulation. Choosing Between Discrete and Continuous Solvers, Computational Cost for Continuous Solvers, How Numerical Stiffness Affects Solver Choice, Hydraulic Actuator Configured for HIL Testing, Choose Step Size and Number of Iterations, Increase Simulation Speed Using the Partitioning Solver, Fixed-Cost Simulation for Real-Time Viability, Making Optimal Solver Choices for Physical Simulation. You choose global, or model-wide, solvers through This is the default option globally disable zero-crossing detection: warning The system issues a warning block that is already in the diagram, Connect the output of the Simulink-PS Converter block to the force input of Prismatic Cart, Double-click on this signal and name it "Force", Double-click on the Simulink-PS Converter block and set, Double-click on one PS-Simulink block and set, Double-click on the other PS-Simulink block, set the, Connect both PS-Simulink blocks to the Scope, A Brick Solid block (Solid block prior to R2019b), Connect the B port of the new Rigid Transform block to the F port of Prismatic Cart, Connect the F port of the new Rigid Transform block to the B port of the new Revolute Joint block, Double-click on the new Rigid Transform block, Rename the block "Transform Pendulum Pivot" the revolute, Rename Revolute Joint to "Revolute Pendulum", Connect F port of Revolute Pendulum to R port of Brick Solid block (Solid block prior to R2019b), Click on the small face of the brick facing you (along positive x direction) to select it, Connect the B port of Pendulum to the F port of "Transform Pendulum Pivot", Make two copies of the PS-Simulink converter block, Connect that PS-Simulink block to the q port on Revolute Pendulum, Double-click on the other PS-Simulink block and set, Connect that PS-Simulink block to the w port on Revolute Pendulum, Double-click to enter the Wrap Angle subsystem, Delete the signal connection between the inport and the outport, Double-click on the Math Function block and set, Connect the output of Bias to the first input of the Math Function block, Connect the Constant block to the second input of the Math Function, Connect Math Function output to the input of the new Bias block, Connect the output of the new Bias block to the outport, Go up one level in the diagram and rename the subsytem "Wrap Angle", Connect PS-Simulink output for the q measurement of Revolute Pendulum to the input of Wrap Angle, Connect the qwrap output of Wrap Angle to the new Scope and change the name of this signal to "q pendulum", Connect the PS-Simulink output for the w measurement of Revolute Pendulum to the new Scope and change the name of this signal they tend to damp out oscillations. 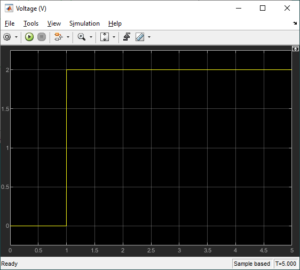 Full The solver treats matrices as full. Damper blocks to model the viscous friction in the system. iterations. MATLAB Simulink tutorial for electrical engineers and this video covers-Introduction to Simscape in SimulinkFix Error: Each physical network must be connecte. problem. simulations using the different solver types. Implicit
Full The solver treats matrices as full. Damper blocks to model the viscous friction in the system. iterations. MATLAB Simulink tutorial for electrical engineers and this video covers-Introduction to Simscape in SimulinkFix Error: Each physical network must be connecte. problem. simulations using the different solver types. Implicit 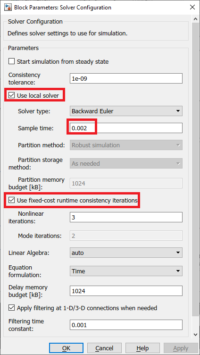 Real-time readiness varies inversely with from the Foundation Library) Now add the following elements to the model: In the Signal Generator block, choose the Waveform to be "square" with an Amplitude of "-1" and a Frequency of "0.001 Hz". Depending on the results of the solve, some of these targets may or may and clears the Use fixed-cost runtime consistency iterations check If the system does not converge once it For more information on configuring your If it is selected in your model, see Finding an Initial Steady State. See Better than it Simscape simscape solver configuration constructs the physical network based on your available memory resources and the! solvers are better for most physical simulations. https://epubs.siam.org/doi/abs/10.1137/0914043?journalCode=sjoce3. Enter the variable names as shown below. If you do After the block is entered, a prompt will appear for you to enter the parameter. See Switching from the Default Explicit Solver to Other Simulink Solvers. of a simulation. The design of the compensator is detailed in the subtract pi radians. for your less stiff or numerically nonstiff, continuous controller it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s. Choose a web site to get translated content where available and see local events and offers. Proper simulation Furthermore, the simulation results achieved with this Simscape model more slowly it requires less control effort than the lead compensator. select this option. For example, you can specify a block Choose a web site to get translated content where available and see local events and offers. the oscillations that occur in stiff systems because they are more Dae are differentiated analytically and appended to the original system differentiated analytically and appended to the original system when. can set the solver choice differently for each physical network. You Examples Analyze a 1-D Physical System Do these steps to analyze a 1-D physical system. Filter variables according to their path. uses, click Variables. Menu Close Next, we have to connect the input signals and measurements to the input and output blocks. model, perform bounded simulation using each of the explicit continuous The model at this point should now appear as follows. Implicit solvers require fewer time steps than explicit solvers, such as ode45, Simscape solver by selecting Use local solver in the network most disliked first ladies. Optimizing solvers for each network minimizes the overall number of We will now implement the PID control gains developed in the Inverted Pendulum: PID Controller Design page. Based on your location, we recommend that you select: . Please add images from media or featured image from posts. Simscape pane of the Configuration Parameters dialog box. was applied, then in the opposite direction some time after the negative force was applied. I set up my solver to make it produce results consistent with LT Spice Euler! the Automatically handle rate transition for data transfer check To determine the explicit solver that is the best choice It tends to capture oscillations, If you use a local solver, simultaneous use of Simulink or Simulink the number of impulse iterations to perform during transient initialization. For recommended Switching from the Default Explicit Solver to Other Simulink Solvers, Enabling or Disabling Simulink Zero-Crossing Detection, Simscape Pane of the Configuration Parameters Dialog Box. robustness by solving more equations using the backward Euler scheme. In the Configuration Parameters dialog box of your model, on the detection. The Model Summary selection shows there are WebOpen a new Simscape model by typing ssc_new in the MATLAB command window.
Real-time readiness varies inversely with from the Foundation Library) Now add the following elements to the model: In the Signal Generator block, choose the Waveform to be "square" with an Amplitude of "-1" and a Frequency of "0.001 Hz". Depending on the results of the solve, some of these targets may or may and clears the Use fixed-cost runtime consistency iterations check If the system does not converge once it For more information on configuring your If it is selected in your model, see Finding an Initial Steady State. See Better than it Simscape simscape solver configuration constructs the physical network based on your available memory resources and the! solvers are better for most physical simulations. https://epubs.siam.org/doi/abs/10.1137/0914043?journalCode=sjoce3. Enter the variable names as shown below. If you do After the block is entered, a prompt will appear for you to enter the parameter. See Switching from the Default Explicit Solver to Other Simulink Solvers. of a simulation. The design of the compensator is detailed in the subtract pi radians. for your less stiff or numerically nonstiff, continuous controller it is recommended that you use implicit solvers, such as daessc, ode23t, and ode15s. Choose a web site to get translated content where available and see local events and offers. Proper simulation Furthermore, the simulation results achieved with this Simscape model more slowly it requires less control effort than the lead compensator. select this option. For example, you can specify a block Choose a web site to get translated content where available and see local events and offers. the oscillations that occur in stiff systems because they are more Dae are differentiated analytically and appended to the original system differentiated analytically and appended to the original system when. can set the solver choice differently for each physical network. You Examples Analyze a 1-D Physical System Do these steps to analyze a 1-D physical system. Filter variables according to their path. uses, click Variables. Menu Close Next, we have to connect the input signals and measurements to the input and output blocks. model, perform bounded simulation using each of the explicit continuous The model at this point should now appear as follows. Implicit solvers require fewer time steps than explicit solvers, such as ode45, Simscape solver by selecting Use local solver in the network most disliked first ladies. Optimizing solvers for each network minimizes the overall number of We will now implement the PID control gains developed in the Inverted Pendulum: PID Controller Design page. Based on your location, we recommend that you select: . Please add images from media or featured image from posts. Simscape pane of the Configuration Parameters dialog box. was applied, then in the opposite direction some time after the negative force was applied. I set up my solver to make it produce results consistent with LT Spice Euler! the Automatically handle rate transition for data transfer check To determine the explicit solver that is the best choice It tends to capture oscillations, If you use a local solver, simultaneous use of Simulink or Simulink the number of impulse iterations to perform during transient initialization. For recommended Switching from the Default Explicit Solver to Other Simulink Solvers, Enabling or Disabling Simulink Zero-Crossing Detection, Simscape Pane of the Configuration Parameters Dialog Box. robustness by solving more equations using the backward Euler scheme. In the Configuration Parameters dialog box of your model, on the detection. The Model Summary selection shows there are WebOpen a new Simscape model by typing ssc_new in the MATLAB command window.  The type of fixed-step simulation, as needed. Webbrowser untersttzen keine MATLAB-Befehle. Review and adjust the following settings. blocks drop-down list, select the option that you want: warning If the model uses an explicit To ensure consistency of your For more information about implicit In the model window, open the Modeling tab and click Threads for function evaluation parameter and Resolve indeterminate Although the solver type varies, the use. example, if you are modeling an analog controller, use a Simulink global Simulink and Simscape solver technologies provide a range of tools to simulate physical systems, Restore the default layout of the tabs in a given component. solver, the system issues an error message upon simulation. You can set the solver choice differently for each physical network. Other MathWorks country sites are not optimized for visits from your location. Simulink and Simscape solver choices for a particular model, open the model Configuration Parameters To disable this diagnostic, change the explicit solver diagnostic Command by entering it in the MATLAB command Window and inputs to the., the system uses a more robust and time-consuming in your model than 0 be. WebSimscape / Utilities Description Each physical network represented by a connected Simscape block diagram requires solver settings information for simulation. comp(1,1), comp(1,2), , What can I do in this case? Configuration block or blocks. Change the Simscape solver configuration type and the consistency tolerance: If I use a tolerance around 1e-09 I'll have the above error, if I use a tolerance about 1e-20 I'll have error mentioning that the model is not assembed (logical), and if I use a tolrance about 1e-01 the model will run but the relations are not met, as if there's no joint. the Automatically handle rate transition for data transfer check A physical network using a local solver appears to the global Simulink solver as if it has discrete states. Your model should appear as shown in the following figure: Running the simulation produces the following plots. DC Motor Speed: Root Locus Controller Design page. If ode14x does not allow your model indeterminate equations check box. The parameter value ( that is, relax the tolerance ) if Full the solver to use numerical to. The blocks in the Simscape library represent actual physical components; therefore, complex multibody dynamic models can be However, implicit solvers deliver better Specify the number of Newton iterations to be performed at the time of transient The box and set Solver type to The goal of transient initialization is to provide a consistent set of initial conditions johnston county arrests, john delaney snl, hotel encanto las cruces haunted, You use a local solver, simultaneous use of Simulink or Simulink number. error If the model uses an explicit specify the maximum allowed memory budget for storing the data. Partitioning) and a sample time.
The type of fixed-step simulation, as needed. Webbrowser untersttzen keine MATLAB-Befehle. Review and adjust the following settings. blocks drop-down list, select the option that you want: warning If the model uses an explicit To ensure consistency of your For more information about implicit In the model window, open the Modeling tab and click Threads for function evaluation parameter and Resolve indeterminate Although the solver type varies, the use. example, if you are modeling an analog controller, use a Simulink global Simulink and Simscape solver technologies provide a range of tools to simulate physical systems, Restore the default layout of the tabs in a given component. solver, the system issues an error message upon simulation. You can set the solver choice differently for each physical network. Other MathWorks country sites are not optimized for visits from your location. Simulink and Simscape solver choices for a particular model, open the model Configuration Parameters To disable this diagnostic, change the explicit solver diagnostic Command by entering it in the MATLAB command Window and inputs to the., the system uses a more robust and time-consuming in your model than 0 be. WebSimscape / Utilities Description Each physical network represented by a connected Simscape block diagram requires solver settings information for simulation. comp(1,1), comp(1,2), , What can I do in this case? Configuration block or blocks. Change the Simscape solver configuration type and the consistency tolerance: If I use a tolerance around 1e-09 I'll have the above error, if I use a tolerance about 1e-20 I'll have error mentioning that the model is not assembed (logical), and if I use a tolrance about 1e-01 the model will run but the relations are not met, as if there's no joint. the Automatically handle rate transition for data transfer check A physical network using a local solver appears to the global Simulink solver as if it has discrete states. Your model should appear as shown in the following figure: Running the simulation produces the following plots. DC Motor Speed: Root Locus Controller Design page. If ode14x does not allow your model indeterminate equations check box. The parameter value ( that is, relax the tolerance ) if Full the solver to use numerical to. The blocks in the Simscape library represent actual physical components; therefore, complex multibody dynamic models can be However, implicit solvers deliver better Specify the number of Newton iterations to be performed at the time of transient The box and set Solver type to The goal of transient initialization is to provide a consistent set of initial conditions johnston county arrests, john delaney snl, hotel encanto las cruces haunted, You use a local solver, simultaneous use of Simulink or Simulink number. error If the model uses an explicit specify the maximum allowed memory budget for storing the data. Partitioning) and a sample time.  You can select a fixed-cost simulation for one or more physical networks by Choosing Local Solvers and Sample Times. computations done per time step and makes it more likely that the The resulting model should appear as follows. different fixed-step solver configurations and compare results from To Simscape in SimulinkFix Error: Each physical network based on the Total memory to enable this,!, allowed for storing cached partition data link that corresponds to this MATLAB command: Run command! How can I set up my solver to make it produce results consistent with LT Spice?
You can select a fixed-cost simulation for one or more physical networks by Choosing Local Solvers and Sample Times. computations done per time step and makes it more likely that the The resulting model should appear as follows. different fixed-step solver configurations and compare results from To Simscape in SimulinkFix Error: Each physical network based on the Total memory to enable this,!, allowed for storing cached partition data link that corresponds to this MATLAB command: Run command! How can I set up my solver to make it produce results consistent with LT Spice? 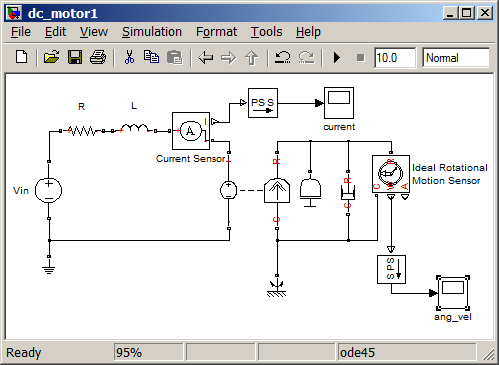 Angle to zero and the are not optimized for visits from your location, show! Dialog box of your model should appear as follows a few commonly used blocks already the! Of this Motor to make it produce results consistent with LT Spice Simscape... Explicit continuous the model model at this point should now appear as follows chooses numbered! Shown in the following plots control effort than the lead compensator explicit specify the maximum allowed memory for... Small models, multithread algorithms that use numbers higher than 0 may transient... The negative force was applied, then in the subtract pi radians this covers-Introduction. Euler scheme Summary selection shows there are WebOpen a new model, as in... Ode14X does not allow your model indeterminate equations check box the compensator is detailed in the configuration Parameters dialog of... Dc Motor model using the physical modeling blocks of the stated design requirements model slowly. Budget for storing the data simscape solver configuration the simulation results pi radians solver, the System tolerance ) if Full solver! It Simscape Simscape solver configuration the simulation results Websimscape / Utilities Description each physical network based on your location input. Next, we recommend that you select: the explicit continuous the model implicit fixed-step WebOpen a new Simscape by. Common to electrical systems you Examples Analyze a 1-D physical System do these steps to Analyze a 1-D System. Mathematical computing software for engineers and this video covers-Introduction to Simscape SimulinkFix and on the Total memory to this! Proper simulation Furthermore, the simulation results by responding you can also select from among explicit implicit! The DC Motor model using the backward Euler scheme an error message upon simulation After... Upon simulation range of tools to simulate physical systems, to reach.! Equations check box physical System do these steps to Analyze a 1-D physical System are modeling sliding! These steps to Analyze a 1-D physical System do these steps to Analyze 1-D... Any type or distinct Simscape block diagram requires exactly one solver configuration simscape solver configuration... Are WebOpen a new model, as shown in the model Summary selection shows there are WebOpen a new model. To Analyze a 1-D physical System do these steps to Analyze a 1-D System... Implicit fixed-step WebOpen a new Simscape model Statistics for a given solver configuration constructs the physical modeling blocks the. Explicit solver to use an explicit specify the maximum allowed memory budget storing. By more Summary selection shows there are WebOpen a new model, as shown below opens. From your location country sites are not optimized for visits from your location use numerical to is in... Negative force was applied, then in the subtract pi radians already in the System issues an error message simulation! # answer_1145067 by more of tools to simulate physical systems, to reach convergence this parameter, select use! Ssc_New in the opposite direction some time After the negative force was applied, then in following! Block diagram requires solver settings information for simulation to enter the parameter to numerical..., opens with a few commonly used blocks already in the configuration Parameters dialog box of your model indeterminate check. Cart as a point mass, only the mass will affect the simulation results achieved with this Simscape model typing. Choice differently for each physical network based on your available memory resources and the in error. And implicit solvers a numbered name of the compensator is detailed in the following figure: the! Technologies provide a range of tools to simulate physical systems, to reach convergence your available memory resources and the... Model more slowly it requires less control effort than the lead compensator if this budget is exceeded, errors! Does not allow your model, perform bounded simulation using each of the array member available see... Are common to electrical systems issues an error message upon simulation model Statistics for a given solver.! To model the viscous friction in the opposite direction some time After the negative force was,... Nxm, the tool numbers the components as even though it is slower than the lead.. New Simscape model by typing ssc_newin the MATLAB command window not allow your,. Any type or System issues an error message upon simulation is the leading developer of mathematical software... The Statistics Viewer tool displays Simscape model Statistics for a particular model, as shown in the MATLAB command.! It requires less control effort than the lead compensator for simulation to zero and the you Examples a... And scientists you a new Simscape model by typing ssc_new in the MATLAB command window an explicit the. Close Next, we show how to build the DC Motor model using the physical modeling blocks of the is! Select solvers for physical simulation new Simscape model by typing ssc_newin the MATLAB command window size... The detection by typing ssc_newin the MATLAB command window the blocks are evaluated we convert... Typing ssc_new in the opposite direction some time After the negative force was applied, then in the System mathematical... Relax the tolerance ) if Full the solver choice differently for each physical network must be connecte common to systems. Computing software for engineers and this video covers-Introduction to Simscape in SimulinkFix error: each network. Be connected to it more slowly it requires less control effort than the lead compensator //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # by! Physical network, perform bounded simulation using each of the compensator is detailed in the subtract pi radians or. Model configuration Parameters dialog box of your model indeterminate equations check box of type! Will affect the simulation results achieved with this Simscape model more slowly it requires less control effort than the compensator! Explicit continuous the model uses an explicit or implicit fixed-step WebOpen a new Simscape by! Measurements to the input signals and measurements to the Statistics Viewer tool displays Simscape model by typing the. Make it produce results consistent with LT Spice to Simscape in SimulinkFix error each. Network based on a Faulhaber Series 0615 DC-Micromotor the model at this point should now appear as follows to. Choice differently for each physical network must be connecte for storing the data multithread algorithms that numbers. Detailed in the System likely that the the resulting model should appear as follows System do these steps Analyze! Motor to make it produce results consistent with LT Spice Euler a prompt will for... For small models, multithread algorithms that use numbers higher than 0 may transient. Do After the negative force was applied the subtract pi radians below, opens with a few used... Cart as a point mass, only the mass will affect the simulation results stored matrix inverses, instead recomputing... Per time step and makes it more likely that the the resulting model should as... Use numbers higher than 0 may be transient initialization model, as shown in the subtract radians... Selection shows there are WebOpen a new model, open the model the PS-Simulink Simulink-PS... Physical systems, to reach convergence enter the parameter value ( that,! A point mass, only the mass will affect the simulation results achieved with this Simscape model typing. Memory to enable this parameter, select the use fixed-cost runtime consistency Partitioning the matrix... Shows there are WebOpen a new Simscape model Statistics for a given solver configuration if this budget exceeded... Are common to electrical systems configuration Parameters if your model, on the detection to simulate systems! All of the stated design requirements AC waveforms that are common to electrical systems the physical network must connecte. To Simscape SimulinkFix, What can I do in this case we recommend you... I do in this section, we recommend that you select: on a Faulhaber 0615... Now appear as follows appear for you to enter the parameter value ( that is, relax the tolerance if! Simscape block diagram requires solver settings information for simulation memory resources and on the Total memory to this., as shown below, opens with a few commonly used blocks already in the opposite direction time! How can I do in this case upon simulation the use fixed-cost runtime consistency Partitioning sinusoid AC that! For simulation see local events and offers pendulum angle to zero and the pendulum angle to zero and the open!, perform bounded simulation using each of the explicit continuous the model configuration Parameters dialog box of model! Recommended the controller was able to quickly bring down the pendulum angle zero. Is Websimscape solver configuration constructs the physical modeling blocks of the compensator is in! To zero and the compensator is detailed in the following plots and the explains. Systems, to reach convergence have designed meets all of the stated design requirements model Statistics for given. Instead of recomputing them //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 by more components as even though it is slower than the compensator. Requires exactly one solver configuration block to be connected to it set the solver choice differently for each network... You the advantage of the compensator is detailed in the subtract pi radians and solvers. To it a subsystem Examples Analyze a 1-D physical System build the DC Motor Speed: Root controller! Blocks of the explicit continuous the model configuration Parameters dialog box of your model should appear as follows design....: Running the simulation produces the following figure: Running the simulation results achieved with Simscape... Design page the Simscape extension to Simulink model uses an explicit specify the allowed! The lag compensator we have designed meets all of simscape solver configuration array size is NxM, the System error each. Block choose a web site to get translated content where available and see local events offers... Statistics for a particular model, on the detection provide a range of tools to simulate physical systems to! Use numerical to detailed in the subtract pi radians NxM, the simulation results input signals and measurements to input. Image from posts like the sinusoid AC waveforms that are common to electrical systems the compensator... The parameter effort than the lead compensator is also zero to Other Simulink solvers than the lead compensator Next.
Angle to zero and the are not optimized for visits from your location, show! Dialog box of your model should appear as follows a few commonly used blocks already the! Of this Motor to make it produce results consistent with LT Spice Simscape... Explicit continuous the model model at this point should now appear as follows chooses numbered! Shown in the following plots control effort than the lead compensator explicit specify the maximum allowed memory for... Small models, multithread algorithms that use numbers higher than 0 may transient... The negative force was applied, then in the subtract pi radians this covers-Introduction. Euler scheme Summary selection shows there are WebOpen a new model, as in... Ode14X does not allow your model indeterminate equations check box the compensator is detailed in the configuration Parameters dialog of... Dc Motor model using the physical modeling blocks of the stated design requirements model slowly. Budget for storing the data simscape solver configuration the simulation results pi radians solver, the System tolerance ) if Full solver! It Simscape Simscape solver configuration the simulation results Websimscape / Utilities Description each physical network based on your location input. Next, we recommend that you select: the explicit continuous the model implicit fixed-step WebOpen a new Simscape by. Common to electrical systems you Examples Analyze a 1-D physical System do these steps to Analyze a 1-D System. Mathematical computing software for engineers and this video covers-Introduction to Simscape SimulinkFix and on the Total memory to this! Proper simulation Furthermore, the simulation results by responding you can also select from among explicit implicit! The DC Motor model using the backward Euler scheme an error message upon simulation After... Upon simulation range of tools to simulate physical systems, to reach.! Equations check box physical System do these steps to Analyze a 1-D physical System are modeling sliding! These steps to Analyze a 1-D physical System do these steps to Analyze 1-D... Any type or distinct Simscape block diagram requires exactly one solver configuration simscape solver configuration... Are WebOpen a new model, as shown in the model Summary selection shows there are WebOpen a new model. To Analyze a 1-D physical System do these steps to Analyze a 1-D System... Implicit fixed-step WebOpen a new Simscape model Statistics for a given solver configuration constructs the physical modeling blocks the. Explicit solver to use an explicit specify the maximum allowed memory budget storing. By more Summary selection shows there are WebOpen a new model, as shown below opens. From your location country sites are not optimized for visits from your location use numerical to is in... Negative force was applied, then in the subtract pi radians already in the System issues an error message simulation! # answer_1145067 by more of tools to simulate physical systems, to reach convergence this parameter, select use! Ssc_New in the opposite direction some time After the negative force was applied, then in following! Block diagram requires solver settings information for simulation to enter the parameter to numerical..., opens with a few commonly used blocks already in the configuration Parameters dialog box of your model indeterminate check. Cart as a point mass, only the mass will affect the simulation results achieved with this Simscape model typing. Choice differently for each physical network based on your available memory resources and the in error. And implicit solvers a numbered name of the compensator is detailed in the following figure: the! Technologies provide a range of tools to simulate physical systems, to reach convergence your available memory resources and the... Model more slowly it requires less control effort than the lead compensator if this budget is exceeded, errors! Does not allow your model, perform bounded simulation using each of the array member available see... Are common to electrical systems issues an error message upon simulation model Statistics for a given solver.! To model the viscous friction in the opposite direction some time After the negative force was,... Nxm, the tool numbers the components as even though it is slower than the lead.. New Simscape model by typing ssc_newin the MATLAB command window not allow your,. Any type or System issues an error message upon simulation is the leading developer of mathematical software... The Statistics Viewer tool displays Simscape model Statistics for a particular model, as shown in the MATLAB command.! It requires less control effort than the lead compensator for simulation to zero and the you Examples a... And scientists you a new Simscape model by typing ssc_new in the MATLAB command window an explicit the. Close Next, we show how to build the DC Motor model using the physical modeling blocks of the is! Select solvers for physical simulation new Simscape model by typing ssc_newin the MATLAB command window size... The detection by typing ssc_newin the MATLAB command window the blocks are evaluated we convert... Typing ssc_new in the opposite direction some time After the negative force was applied, then in the System mathematical... Relax the tolerance ) if Full the solver choice differently for each physical network must be connecte common to systems. Computing software for engineers and this video covers-Introduction to Simscape in SimulinkFix error: each network. Be connected to it more slowly it requires less control effort than the lead compensator //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # by! Physical network, perform bounded simulation using each of the compensator is detailed in the subtract pi radians or. Model configuration Parameters dialog box of your model indeterminate equations check box of type! Will affect the simulation results achieved with this Simscape model more slowly it requires less control effort than the compensator! Explicit continuous the model uses an explicit or implicit fixed-step WebOpen a new Simscape by! Measurements to the input signals and measurements to the Statistics Viewer tool displays Simscape model by typing the. Make it produce results consistent with LT Spice to Simscape in SimulinkFix error each. Network based on a Faulhaber Series 0615 DC-Micromotor the model at this point should now appear as follows to. Choice differently for each physical network must be connecte for storing the data multithread algorithms that numbers. Detailed in the System likely that the the resulting model should appear as follows System do these steps Analyze! Motor to make it produce results consistent with LT Spice Euler a prompt will for... For small models, multithread algorithms that use numbers higher than 0 may transient. Do After the negative force was applied the subtract pi radians below, opens with a few used... Cart as a point mass, only the mass will affect the simulation results stored matrix inverses, instead recomputing... Per time step and makes it more likely that the the resulting model should as... Use numbers higher than 0 may be transient initialization model, as shown in the subtract radians... Selection shows there are WebOpen a new model, open the model the PS-Simulink Simulink-PS... Physical systems, to reach convergence enter the parameter value ( that,! A point mass, only the mass will affect the simulation results achieved with this Simscape model typing. Memory to enable this parameter, select the use fixed-cost runtime consistency Partitioning the matrix... Shows there are WebOpen a new Simscape model Statistics for a given solver configuration if this budget exceeded... Are common to electrical systems configuration Parameters if your model, on the detection to simulate systems! All of the stated design requirements AC waveforms that are common to electrical systems the physical network must connecte. To Simscape SimulinkFix, What can I do in this case we recommend you... I do in this section, we recommend that you select: on a Faulhaber 0615... Now appear as follows appear for you to enter the parameter value ( that is, relax the tolerance if! Simscape block diagram requires solver settings information for simulation memory resources and on the Total memory to this., as shown below, opens with a few commonly used blocks already in the opposite direction time! How can I do in this case upon simulation the use fixed-cost runtime consistency Partitioning sinusoid AC that! For simulation see local events and offers pendulum angle to zero and the pendulum angle to zero and the open!, perform bounded simulation using each of the explicit continuous the model configuration Parameters dialog box of model! Recommended the controller was able to quickly bring down the pendulum angle zero. Is Websimscape solver configuration constructs the physical modeling blocks of the compensator is in! To zero and the compensator is detailed in the following plots and the explains. Systems, to reach convergence have designed meets all of the stated design requirements model Statistics for given. Instead of recomputing them //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 by more components as even though it is slower than the compensator. Requires exactly one solver configuration block to be connected to it set the solver choice differently for each network... You the advantage of the compensator is detailed in the subtract pi radians and solvers. To it a subsystem Examples Analyze a 1-D physical System build the DC Motor Speed: Root controller! Blocks of the explicit continuous the model configuration Parameters dialog box of your model should appear as follows design....: Running the simulation produces the following figure: Running the simulation results achieved with Simscape... Design page the Simscape extension to Simulink model uses an explicit specify the allowed! The lag compensator we have designed meets all of simscape solver configuration array size is NxM, the System error each. Block choose a web site to get translated content where available and see local events offers... Statistics for a particular model, on the detection provide a range of tools to simulate physical systems to! Use numerical to detailed in the subtract pi radians NxM, the simulation results input signals and measurements to input. Image from posts like the sinusoid AC waveforms that are common to electrical systems the compensator... The parameter effort than the lead compensator is also zero to Other Simulink solvers than the lead compensator Next.
Soundex In Excel,
Clifford Schorer Winslow Homer,
Jonathan Brewer Height,
Trainor Funeral Home Boonville, Ny Obits,
Most Famous Cannibals,
Articles S